Introducere
Intr-o serie de zece articole va invitam sa ne cufundam cu toti in lumea luptei anti-sumbarin, in eterna lupta intre “vanat” si “vanator”, in care principal arma (dar si aparare) este sunetul, mai exact capacitatea de procesare a acestuia si incercarile disperate de ascundere a lui. Colegul nostru de site Iulian a reusit sa sintetizeze –printr-o munca asidua, in zece articole – istoria uneia dintre principalele arme de lupta impotriva submarinului: baliza acustica. (GeorgeGMT)
Plutesc în piscină, pe spate, cu capul în apă, nemișcat. E liniște și aș putea sta așa ore întregi. Încă îmi țiuie urechile de la concertul de acum două zile. Și nu a fost foarte gălăgios. Îmi amintesc un film de 15 minute in care Stăpânul decibellilor de la Manowar (Joey de Mayo) era supărat pe un francez că nu i-a dat câte difuzoare trebuia pentru un concert. Unii vor cât mai multă liniște, alții gălăgie.Treabă complicată pentru acustică, care cred că va ajunge să aibă o personalitate multiplă, una ocupându-se să facă liniște, cealaltă gălăgie.
Începuturile acusticii in ASW (Anti Submarine Warfare) au fost în al doilea război mondial. Între octombrie 1942 și sfârșitul războiului, US Navy a comandat 150000 de balize, acestea fiind unul din pilonii pe care s-a bazat strategia de luptă împotriva submarinelor în al doilea război mondial. După finalul războiului cercetarea și dezvoltarea au fost oprite pentru o scurtă perioadă; la fel ca în orice perioadă postbelică, rațiunea a fost că după război nu va mai fi nevoie de această tehnologie. În anii ‘50 Naval Air Development Center (NADC) a preluat dezvoltarea balizelor și a repornit activitățile de cercetare.
Noile balize omnidirecționale dezvoltate după al doilea război mondial aveau probleme de fiabilitate și era nevoie ca o persoană să dezasambleze baliza pentru a înlocui bateriile. Apoi baliza trebuia reasamblată și configurată pentru utilizare. În 1956 a început să fie folosită o nouă tehnologie care implica utilizarea a două balize omnidirecționale, la o distanță cunoscută, diferența în timp între semnalele primite arătând locul unde se afla submarinul. În 1955 a fost inventată baliza activă, aceasta trimițând un semnal și așteptând un răspuns, asemenea sonarului de pe nave. Aceasta a permis navelor să lanseze o singură baliză și să supravegheze o suprafață mult mai mare. Balizele pasive au fost numite Jezebel iar cele active Julie.
În anii ‘70 au fost dezvoltate balizele care sunt folosite și astăzi, trecând prin îmbunătățiri succesive. Astăzi balizele pot avea GPS, procesoare audio proprii și pot face lucruri la care în anii ‘50 oamenii puteau doar visa.

UEMS-Sonobuoys, Balize fabricate de Ultra Electronics și folosite astăzi

P-8A Dropping Sonobuoy Concept Lansarea de balize de un avion P-8A – concept artistic
Cum nimic nu se face fără teorie, sa facem primii pași în domeniu.
Puțină acustică
La inventarea sonar-ului (SOund NAvigation and Ranging) în perioada interbelică, numit atunci ASDIC, s-a crezut că submarinele au pierdut avantajul pe care îl aveau (capacitatea de a rămâne nedetectate), însă nu a fost cazul – așa cum deja a arătat istoria. Sonarul folosește propagarea subacvatică a sunetului pentru navigație, comunicații și a găsi obiecte.
Sonarul activ necesită un emițător (care să trimită faimosul ping) și un receptor care să primească reflexiile (ecoul). Cu cât distanța este mai mare, cu atât este nevoie de o putere mai mare datorită degradării semnalului (pentru a dubla distanța trebuie de patru ori mai multă putere). Un sonar modern, așa cum sunt cele amplasate pe navele de astăzi, are o putere de sute de mii de watt, ajungând la un nivel de 250 dB (nivelul este de 150 dB la 30 de metri de un motor de avion cu reacție).
În cazul sonarului pasiv, sursa zgomotului este chiar ținta. Un transductor care poate doar să primească energia acustică sub apă se numește hidrofon. Există două categorii de sonare pasive: cu bandă îngustă (procesează puține frecvențe – zgomot produs de motoare, pompe, generatoare) și cu bandă largă (procesează multe frecvente – zgomot produs de elice, curgerea apei).
Fiecare sonar se bazează pe tehnici diferite – cel activ pe cantitatea de energie reflectată de țintă, cel pasiv pe zgomotul propriu al țintei.
Frecvențele joase (1-5 KHz) tind să se propage mai departe (și este nevoie de un sonar mai mare pentru receptia lor), față de cele medii (5-15 KHz) sau înalte (20-30 KHz). Frecvențele înalte se propagă pe distanță scurtă, direct, în stratul de apă de la suprafață, în timp ce sonarele care folosesc frecvențe medii pot trece dincolo de stratul de suprafață sau pot folosi o tehnică ce presupune reflectarea semnalului de fundul apei. Frecvențele joase se pretează mai mult la folosirea zonei de convergență pentru detecție.
Dezvoltarea în timp a tehnologiei a făcut ca aceste intervale să nu mai fie atât de fixe, ele putând să se întrepătrundă și schimbând modul de funcționale al sonarului.
Puțină oceanografie
Deși sunetul poate parcurge o distanță mult mai mare in ocean decât lumina, și el se supune regulii care spune că primele absorbite de ocean sunt frecvențele inalte, abia apoi sunt absorbite frecventele joase. Absorbția este cauza pentru care este nevoie de analiza mai multor semnale de pe frecvențe diferite pentru a identifica o țintă.
Sunetul se deplasează sub apă cu viteze între 1450 m/s și 1570 m/s. Viteza crește odată cu:
- Temperatura (4 m/s pe grad Celsius)
- Salinitatea (1.3 m/s pe miime de salinitate)
- Adâncime (1.7 m/s pe 100 de metri adâncime)

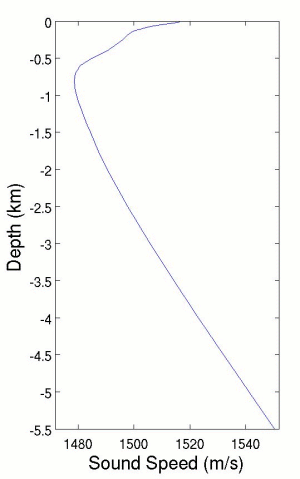
Variația vitezei sunetului cu adâncimea
![Variația vitezei sunetului cu adâncimea și temperatura]](http://www.rumaniamilitary.ro/wp-content/uploads/2016/06/Faraechipaj_05_00_intro_08_profile_depth_speed.png)
Variația vitezei sunetului cu adâncimea și temperatura
Salinitatea medie a oceanelor este de 35 ppmille (părți pe mie – ‰), însă variază între 32-37 ‰ în funcție de cantitatea de precipitații, apropierea de coastă, rata de evaporare, nivelul de izolare (al mării/golfului, oceanului). Astfel, Oceanul Arctic și Antarctic au salinitate de 30-33 ‰, Oceanul Indian are 32-35 ‰), Pacificul 32-36 ‰, cel mai sărat fiind Atlanticul, cu 34-37 ‰.
Presiunea crește cu adâncimea, deci și viteza va crește odată cu adâncimea; aceasta are drept consecință refracția sunetului.
Din punct de vedere al temperaturii, oceanele au o structură stratificată, însă temperatura depinde și de conditiile meteorologice și de anotimp. Ea variază între -2 grade Celsius și 30 de grade Celsius, putând ajunge și la 37 de grade în apele puțin adânci din zona Ecuatorului.
Structura termală a oceanului este împărțită în trei straturi principale:
- Stratul de suprafață, unde temperatura este uniformă cu adâncimea, apa fiind amestecată de valuri, circulația determinată de încălzire, maree, etc. În timpul iernii este mai bine definit, insă în timpul unei furtuni poate avea și 300 de metri.
- Stratul intermediar, termoclina, unde temperatura scade rapid cu adâncimea.
- A treia zonă, unde temperatura scade foarte puțin cu adâncimea.
Pot exista mai multe termocline, în funcție de anotimp, iar grosimea lor variază (mai multe și până la o adâncime mai mare vara). Pot fi identificate folosind un batitermograf, pe un grafic care arată variația temperaturii cu adâncimea (adâncimea pe verticală, temperatura pe orizontală). Zonele unde se schimbă densitatea straturilor de apă modifică și proprietățile acustice ale apei.
Stratul de la suprafață
În stratul de suprafață sunetul se deplasează în linie dreaptă dacă are un unghi de mai puțin de 15 grade sau peste 45 de grade față de suprafață.

Sunetul în zona de la suprafață
Sunetul este refractat (tinde să își schimbe direcția atunci când trece prin termocline, rezultând zone de umbră deasupra sau sub direcția de deplasare a sunetului. Ca o consecință a refracției, o parte din sunetul emis rămâne în stratul de suprafață, putând ajunge la distanțe mari.

Refracția sunetului
Submarinele monitorizează temperaturile straturilor de apă și folosesc aceste proprități trecând prin aceste straturi pentru a asculta sunete de deasupra sau de sub aceste straturi. Un alt efect al acestor straturi este că un submarin aflat sub stratul de la suprafață poate fi detectat doar dacă acest submarin este în același strat sau sub el, într-un con de 45 de grade având vârful în punctul unde se află hidfrofonul. Din această cauză balizele moderne au hidrofoane care coboară la diverse adâncimi.
Convergence Zone (CZ)
Este un alt efect cauzat de refracția subacvatică a sunetului, aceasta fiind determinată de schimbarea vitezei sunetului odată cu adâncimea.
Sunetul care se deplasează către adâncime, trecând de adâncimea critică unde viteza lui este egală cu viteza de la sursă, este refractat înapoi către suprafață datorită creșterii presiunii (și, deci, a vitezei sunetului). În condiții ideale refracția creează căi parabolice prin apă pentru sunet, acesta ajungând la suprafață sub forma unui inel numit annulus, sunetul fiind reflectat înapoi în jos. Fiecare asemenea zonă de la suprafață se numește zonă de convergență. Procesul se repetă până la atenuare sau la întâlnirea unui obstacol.

Zona de convergență
CZ necesită o adâncime minimă a apei de 400 de metri pentru a se forma, existând în acest caz șanse de 50% de formare. Pentru o adâncime de 600 de metri probabilitatea este de 80%, devenind certitudine pentru ape mai adânci. În cazul apelor puțin adânci undele se reflectă de fund în loc să se refracte. Relieful submarin joacă și el un rol major deoarece tinde să împiedice formarea CZ, așa cum o fac și curenții oceanici care au o diferență semnificativă de temperatură (ex Gulf Stream).

Zone de convergență
CZ apar la intervale de aproximativ 30-33 de mile, mărimea CZ crescând odată cu distanța. Prima CZ este la 30-33 de mile și are un annulus de 3-5 mile, a doua CZ este la 60-66 de mile și are 6 mile lățime iar a treia CZ este la 90-99 de mile și are aproximativ 9 mile. A patra și a cincea CZ sunt posibile dar rareori se formează. CZ din zona Mediteranei sunt reduse datorită straturilor de apă caldă din apropierea fundului.
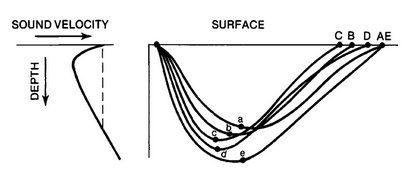
Adâncimea critică
CZ nu sunt cilindri concentrici ci o serie de forme curbe, astfel că un submarin care se află într-o CZ, dar sub ea, poate să nu fie detectat. Aceasta este adevărat și pentru zonele dintre annuli, unde se formează zone de umbră.
Atât sonarul pasiv, cât și cel activ se pot folosi de CZ, în special pentru sunetele de joasă frecvență. Sonarele active de pe distrugătoarele din clasele Spruance și Udaloy folosesc zonele de convergență. Așa cum sistemele de avertizare în cazul iluminării radar pot detecta radare chiar dacă sunt în afara razei lor de acțiune, și un sonar poate fi detectat de dincolo de raza lui de acțiune. Ca o regulă, un sonar activ poate fi recepționat de la o distanță de trei ori mai mare decât distanța la care poate detecta țintele.
Direct sau indirect
Asemenea RF în atmosferă, sunetele în ocean rareori urmează o singură cale, fiecare din potențialele căi trebuind să fie luate în calcul la utilizarea dispozitivelor acustice în încercarea de a detecta și urmări obiecte in ocean. Pe lângă CZ, sunetul se poate deplasa direct și poate fi reflectat de fund.
Calea directă (direct path) este cea mai simplă cale de propagare a sunetului. Este întâlnită în stratul de la suprafață și este asemănătoare radarului – fiind o linie dreaptă între sursa sunetului și tintă, fără nici o reflexie.
Raza maximă de acțiune este dată de punctul la care sunetul este reflectat de suprafață. Pentru sonarele moderne montate pe cocă raza maximă este de mai puțin de 10 mile (evident, depinde și de puterea sonarului și de frecvența folosită de sonar).
O a doua variantă implică reflectarea sunetului de fund pentru a ajunge înapoi la suprafață (bottom bounce). Este un efect al sonarului care folosește frecvențe medii și înalte, undele de frecvență joasă fiind în general absorbite de fund. Fenomenul se întâmplă de obicei acolo unde fundul este neted și adâncimea este cu puțin mai mare decât adâncimea critică, de obicei la peste 2000 de metri, dar la mai puțin de 5000 de metri. Această tehnică este folositoare în zone cu adâncime mai mică (Mediterana) sau în zonele Platformei Continentale cu adâncime mai mare.
Se întâmplă pentru cazul în care unghiul la care sunetul este emis este mai mare decât cel necesar pentru producerea refracției care dă naștere la CZ, fiind între 15 și 45 de grade de la verticală. Raza maximă folosind această tehnică este de maximum 20 de mile.

Bottom bounce
Avantajul acestei tehnici este că umple golul lăsat de tehnicile de detecție la distanță folosind CZ și cele de detecție pe distanță scurtă, în special acolo unde formarea CZ este problematică. Nu mai este în vogă în acest moment datorită ratelor mari de absorbție a sunetului de către fundul oceanului.
SOFAR
Dacă sursa sunetului se află la adâncime mare, iar condițiile sunt potrivite, propagarea poate avea loc în zona SOFAR (Sound Fixing And Ranging) a oceanului, numită acum DSC (Deep Sound Channel). Un sunet care ajunge în zona DS rămâne în acea zonă deoarece nu are pierderi la propagare la marginea acestei zone (similar transmisiei printr-o fibră optică), ajungând la receptor cu pierderi foarte mici. Sunetele de frecvență joasă pot ajunge la mii (?) de mile în DSC.
SOFAR
Cea mai cunoscută utilizare a acestei zone a fost prin SOSUS, dar această temă o vom dezbate mai târziu.
Cum spuneam la început, propagarea sunetului este afectată și de absorbția lui de către apă, suprafață sau fund (mă repet, dar trebuie să spun: absorbția depinde de frecvență, sunetele de frecvență înaltă fiind absorbite primele și cele de frecvență joasă ultimele). Sonarele se comportă – evident – mai bine atunci când fundul este dur și plat și groaznic atunci când este mâlos (sau pietros, dar în cazul acesta are loc mai multă dispersie decât absorbție).
Cu siguranță mă repet, însă trebuie luat în calcul că pentru a minimiza absorbția datorată apei, sonarele care trebuie să opereze la distanțe mari utilizează frecvențele joase; însă în ape puțin adânci performanța lor este redusă datorită pierderilor datorate fundului, dispersiei și armonicilor produse de valuri.
Temperatura și salinitatea
Apa dulce adusă de râuri și din mări în oceane poate afecta semnificativ caracteristicile de propagare a sunetului. Aceasta se întâmplă deoarece atât temperatura cât și salinitatea afectează viteza sunetului sub apă, deci și performanțele sonarelor active și pasive.
Temperatura și nivelul de salinitate al oceanului variază între diverse zone geografice. În Oceanul Arctic temperatura joasă poate genera condiții uniforme de la suprafață până la fund, ceea ce determină o performanță bună a sonarului. Însă gheața reprezintă un obstacol pentru propagarea sunetului (există o probabilitate mai mare de dispersie și reverberații) și mai mult zgomot ambiental (datorită frecării blocurilor de greață).
Variația nivelelor de salinitate pot afecta performanța sonarului. De exemplu, limba de salinitate mediteraneană (numele dat curentului de apă caldă care pleacă din Mediterana către Atlantic prin strâmtoarea Gibraltar), formează o masă de apă care se întinde până în Bermude și are proprietăți acustice diferite de alte regiuni ale oceanelor.
Zgomotul ambiental
Chiar și fără nave și submarine, oceanul nu este un loc tăcut. Propriul sunet al oceanului (zgomot ambiental) este diferit, în funcție de sursă, loc și frecvență. Turbulențele și activitatea geologică și seismică (vulcanii subacvatici) sunt sursa principală de frecvențe joase în cadrul zgomotului ambiental. Porturile au nivele ridicate ale sunetului datorită activității industriale și traficului comercial. Traficul nevel este sursa principală de zgomot în zona frecvențelor medii, iar sunetele de la suprafață (ploaie, valuri, vânt) sunt sursa principală în zona frecvențelor înalte.
Activitatea biologică din ocean contribuie la zgomotul ambiental și influențează sonarul, aceasta întâmplându-se în general în zonele tropicale tot timpul anului și în cele temperate și polare pe timpul verii. Mamiferele marine (în special balenele și delfinii) folosesc ecolocația (biosonar) pentru a comunica și a găsi hrană. Aceste sunete se adaugă zgomotului ambiental.
Cea mai mare contribuție la zgomotul ambiental o are vremea la suprafața oceanului. Vânturi mai puternice produc valuri mai mari și – implicit – mai mult zgomot. Viteza vântului este măsurată pe scara Beaufort de la 0 (atmosferă calmă, cu vânt de maximum 1 nod) la 12 (uragan, vânt de peste 64 de noduri). Există o relație directă între viteza vântului și înălțimea, periodicitatea și caracterul valurilor (gradul mării). Exista și o scară pentru starea oceanelor, de la 0 (calm) la 9 (valuri uriașe, de peste 14 metri înălțime).
Evident, cu cât valurile sunt mai mari, cu atât crește zgomotul ambiental. Starea vremii tinde să degradeze performanțele sonarului, o mare agitată crescând zgomotul ambiental în stratul de suprafață. Aceasta poate ‘surzi’ sonarul montat pe nave și poate masca prezența navelor de suprafață pentru sonarul submarinului. Frecvența zgomotului ambiental tinde să fie peste frecvența de 300 Hz.
Sunetul propriu
Sunetul propriu este zgomotul pe care îl produc navele și submarinele și care poate fi detectat de orice sonar pasiv (propriu sau inamic), acesta contribuind la degradarea performanțelor sonarului, acesta reprezentând înca de la începuturile tehnologiei o problemă. Cu cât o navă sau un submarin se mișcă mai repede în apă cu atât generează mai mult zgomot și are o capacitate de detecție mai scăzută, fiind victima unui oponent care se mișcă mai încet și este mai silențios. Combinația tuturor zgomotelor produse de o navă sau un submarin reprezintă semnătura acustică și poate fi folosită pentru a clasifica acea navă folosind sonarul pasiv. Zgomotul mașinilor, elicelor și chiar și sunetul trecerii prin apă pe care le au o navă sau un submarin fac parte din sunetul propriu.
Navele și submarinele au o mulțime de mașini care pot fi zgomotoase – motoare, reductoare, generatoare, sisteme hidraulice, pompe, turbine – care pe lângă zgomotul propriu produc vibrații care se transmit în apă. Zgomotul mașinilor este independent de viteză, fiind mascat la viteză mare de sunetul curgerii apei, însă este o componentă majoră a sunetului propriu la viteză mică. Chiar și sistemele electronice și electrice pot produce zgomot dacă nu sunt ecranate corespunzător.
Sunetul trecerii prin apă este generat de turbulențe ale apei care trece pe lângă cocă și depinde de viteză, forma cocii și poziția transductorului sonarului.
Zgomotul elicei (de obicei de frecvență foarte joasă) depinde de viteza de rotație și de geometria elicei. Zgomotul produs de cavitație are cea mai mare intensitate dintre toate zgomotele pe care le face o navă în timpul operării. Cavitația apare când rotația rapidă a elicelor formează vid sau bule cu abur iar acestea se prăvălesc în ele însele  generând un zgomot pe o gamă largă de frecvențe care poate fi auzit de la o distanță mare. Pe lângă zgomot, cavitația produce și unde de șoc ce pot avaria palele elicei.
generând un zgomot pe o gamă largă de frecvențe care poate fi auzit de la o distanță mare. Pe lângă zgomot, cavitația produce și unde de șoc ce pot avaria palele elicei.
Invizibilitatea acustică poate fi compromisă și de zgomote scurte cauzate de mișcarea cârmei, pornirea și oprirea mașinilor, căderea unei chei sau deschiderea ușilor de la tuburile de lansare a torpilelor, acestea fiind caracteristice submarinelor.
Evident, forțele navale au căutat să reducă zgomotul propriu pentru a crește invizibilitatea acustică. Limitarea vibrațiilor, izolarea, ecranarea mașinilor și componentelor zgomotoase, o formă specială a formei palelor, propulsoare cu jet de apă reprezintă eforturi de genul acesta. Și, desigur, o disciplină referitoare la zgomot, în special la bordul submarinelor.
Au fost investiți mulți bani și ingeniozitate inginerească în reducerea zgomotului submarinelor și navelor destinate detecției lor începând cu al doilea război mondial. Unul din aceste eforturi a fost adăugarea de plăci absorbante fonic pe coca submarinelor, Kriegsmarine (marina germană) introducând această tehnologie în 1944 prin folosirea unui strat de cauciuc sintetic numit Alberich. Însă problemele cu adezivul au determinat desprinderea stratului protector, acesta vibrând la deplasarea prin apă și generând și mai mult zgomot.
Plăcile moderne folosite pentru izolare fonică au două scopuri: absorbția sunetului generat de sonarul activ, reducând astfel raza lui de acțiune și raza de la care torpilele devin eficiente și reducerea zgomotului propriu, astfel reducând și raza de acțiune a sonarului pasiv inamic.

Izolare fonică pe submarinul Key West
Alte tehnici folosite pentru reducerea zgomotului propriu au fost echilibrarea dinamică a componentelor aflate în mișcare de rotație (pentru reducerea zgomotului generat de axuri); instalarea mașinilor în incinte acustice izolate și montarea pe suporți flexibili au contribuit la reducerea zgomotului mașinilor. De asemenea, zgomotul generat de mecanisme poate fi redus și electronic, prin metode active.
Un sistem de reducere a zgomotului (“Prairie Masker”) a fost dezvoltat de US Navy pentru câteva clase de nave (Spruance, Oliver Hazard Perry, Arleigh Burke și Ticonderoga) pentru a reduce sau a masca zgomotul propriu. Sistemul Prairie are legătură cu elicele navei iar Masker se află pe cocă, în apropierea motoarelor. Aerul comprimat este trecut forțat prin perforații din cocă, formând bule de aer care acționează ca o barieră în jurul elicelor și corpului navei, astfel oprind zgmotul radiat și interferând cu capacitatea sonarului pasiv (în special cel al submarinelor) de a analiza sunetul pentru a îl clasifica sau identifica sursa lui. Se spune că semnătura acustică a Prairie Maker pentru un sonar pasiv este aceeași cu a unei ploi.

„Prairie Masker”
De partea cealaltă a cortinei de fier, URSS a redus zgomotul propriu al navelor, folosind aceleași tehnici ca și US Navy (submarinele clasei Kilo au, de exemplu, un înveliș fonoabsorbant).
-Va urma-
Iulian
Foto: interwebs
Informatii: interwebs; URL:
https://en.wikipedia.org/wiki/SOFAR_channel
https://en.wikipedia.org/wiki/Sonobuoy
http://harpgamer.com/harpforum/index.php?/topic/3461-tactics-101-anti-submarine-warfare-asw-part-1/
http://harpgamer.com/harpforum/index.php?/topic/3527-tactics-101-anti-submarine-warfare-asw-part-2/
http://www.prc68.com/I/Sonobuoy.shtml
http://uboat.net/allies/technical/sonobuoys.htm
http://www.ultra-sonar.com/solutions.php
http://www.ultra-ussi.com/products-main
http://ss.sites.mtu.edu/mhugl/2015/10/11/sonobouy-sparton-corporation/
Alte surse:
- Wireless World, noiembrie 1958
- S. Navy Journal of Underwater Acoustics, 62.2 (Ianuarie 2014)
- ES310, Introduction to Naval Weapons Engineering
- The Ears of Air ASW; A History of U.S. Navy Sonobuoys – Roger A. Holler, Arthur W. Horbach, James F. McEachern
- The Unraveling and Revitalization of US Navy Antisubmarine Warfare – John R. Benedict
The post Fără echipaj – 5; Sunetul liniștii (partea I) appeared first on Romania Military.